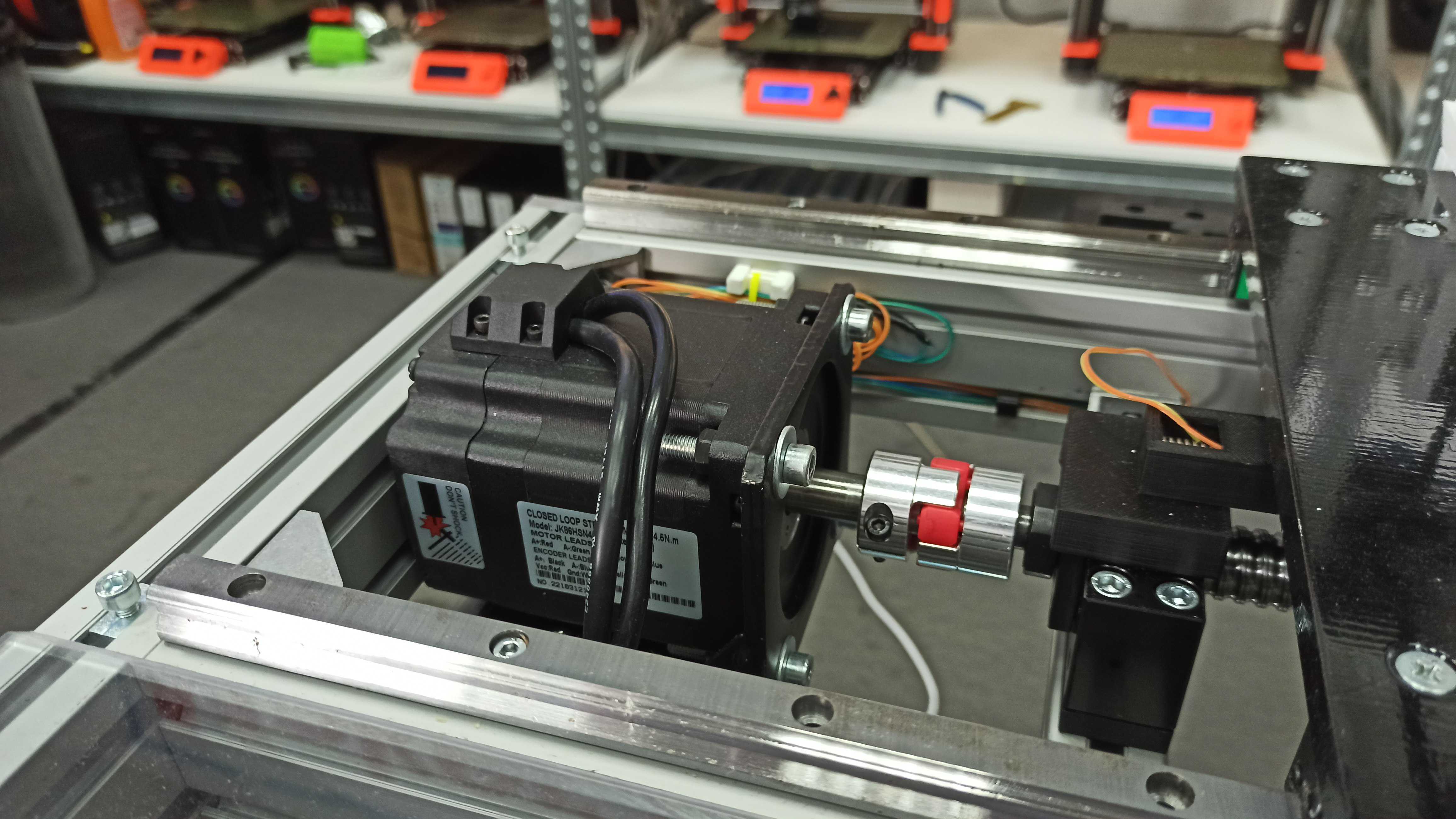
U sklopu projekta dizajniranja i izrade 7. ose za UR5e cobota, razvijen je sistem upravljanja stepper motorom. U projektu se koristi stepper motor sa zatvorenom petljom koji ima enkoder od 1000 linija, što znači da ovaj motor nikada ne gubi poziciju koraka. Za kontrolu je upotrijebljen Raspberry Pi 3 Model B MCU, koji omogućava i dodatne mogućunosti spajanja motora sa drugim uređajima, kao što je UR5e cobot. Motor koristi pulsno upravljanje putem HSD86 stepper motor drivera, što znači da svaki puls odgovara jednom pomaku u zavisnosti od rezolucije koja je postavljena a može biti od 400 do 51200 pulseva po obrtaju motora. Budući da je fiksna vrijednost ugla koju stepper motor prelazi za jedan puls, promjena brzine se vrši variranjem vremena razmaka između pulseva. Motor se vrlo intuitivno kontroliše pozivanjem funkcije "pokreni_se" u koju se prosljeđuju 4 argumenta: željena pozicija (mm), brzina (mm/s), ubrzanje (mm/s2) i trenutna pozicija (mm). Nakon pozivanja funkcije, motor započinje kretanje sa datim ubrzanjem, nakon čega vrši kretanje konstantnom brzinom.